Fallstudien
Produktdesign
Die Arbeiten untersuchen die Potentiale der Robotik sowohl für die Prototypisierung physischer Konzepte als auch für das Experimentieren mit unterschiedlichen Materialien. Studierende sollen Strategien für ein sich permanent veränderndes technologisches Umfeld erproben.
Experimental Approach
Studierende: Carl Bahra, Christian Breuckmann, Yugang Dong, Tony Jankowski, Markus Leszczyk, Wie-Ping Lu, Elisa Machmer, Ilija Majcen, Moritz Müller, Jasper Neukirch, Fabian Neumueller, Natalie Marie Preuß, Carlotta Simon, Paola Aldana Vidal, Fu Yitao
Lehrende: Jörg Hugo, Konrad Jünger, Prof. Nils Krüger, Andrea Rossi
Die Fallstudie „Experimental Approach“ (Wintersemester 2020/2021) war in drei Teile gegliedert: Einführung, Erkundung und Anpassung. In jeder Phase erhielten die Studierenden Themen und Materialien, die sie frei erforschen und innerhalb dieser Grenzen ihre eigenen Forschungsfragen finden konnten. Die Autonomie wurde mit jeder Phase größer, so dass sie am Ende des Projekts ihre eigenen Werkzeuge und Roboteraufbauten entwickelten.
Malwerkzeuge
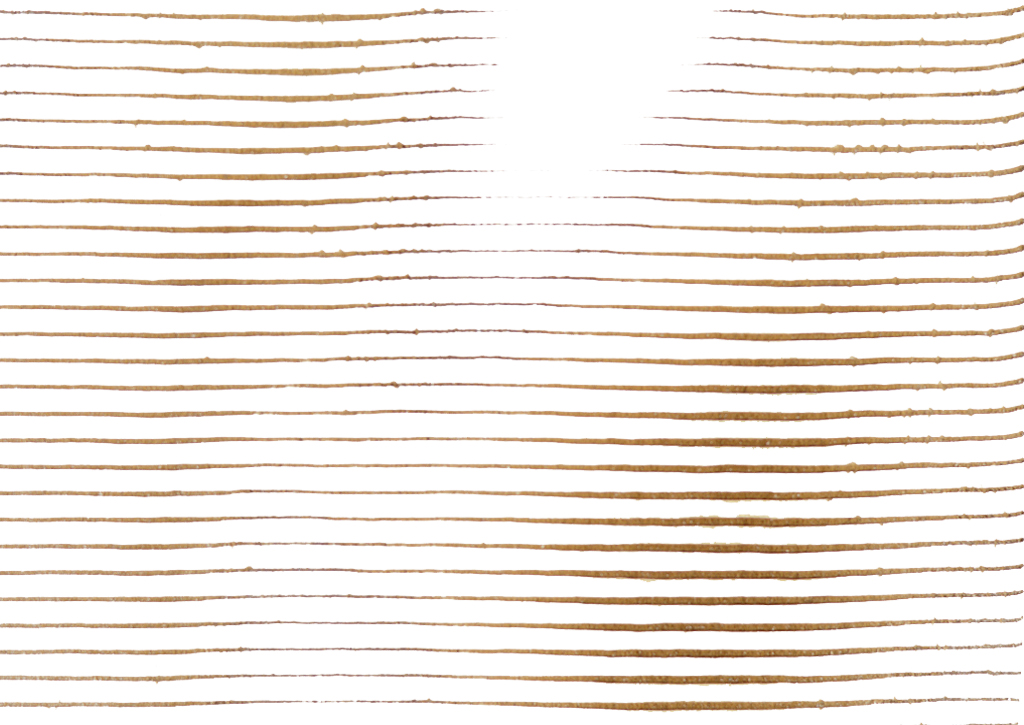
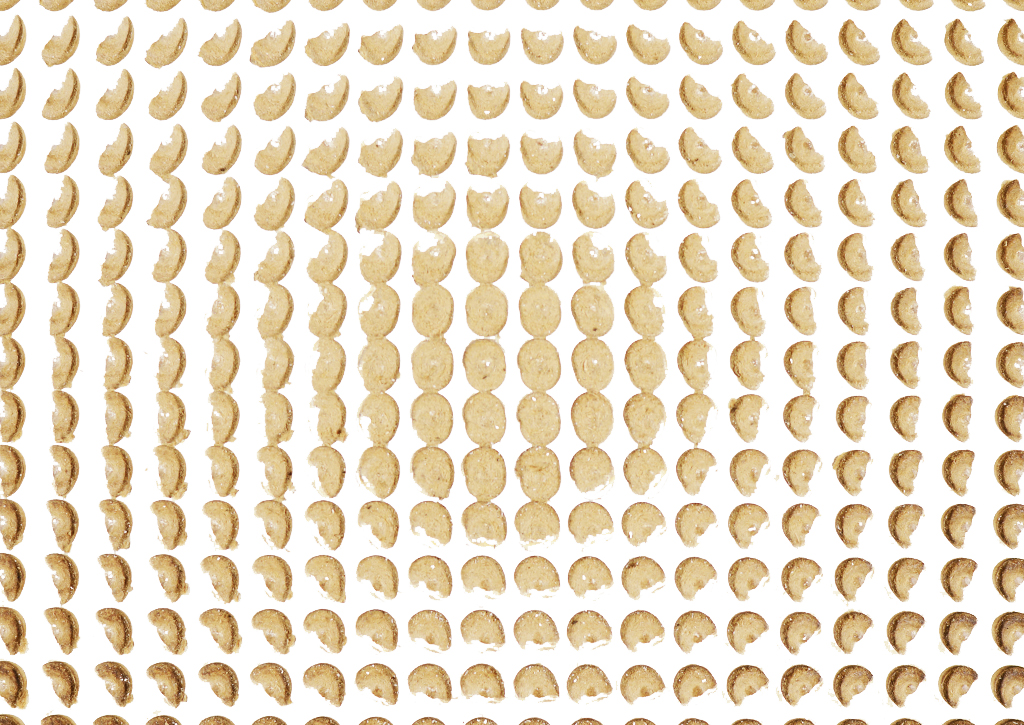
Die Studierenden wurden anfangs durch einfache, zweidimensionale Bewegungen (z.B. Malen mit einem Stift) an die Technologie herangeführt. Der Fokus lag hierbei auf dem Mal-Werkzeug sowie der gestalterisch-ästhetischen Qualität der Ergebnisse und weniger auf der Generierung komplexer Grasshopper-Programme. Ziel war es, die Bewegungsmuster des Roboters als Gestaltungselement aufzugreifen und diese auf dem Papier festzuhalten. Dazu wurde die „Dripstick Master“-Werkzeug-spitze genutzt, die mit unterschiedlichen Farben befüllt werden konnten und die einen besonders strukturierten Strich aufwiesen.
Die unterschiedlichen Farbtöne sowie paralleles, überlagerndes oder sich durchkreuzendes Auftragen erzeugen beim Zeichnen mit dem Roboter ein hohes Maß an Komplexität bis hin zu einer scheinbaren Dreidimensionalität und bilden den gestalterischen Rahmen für diesen Versuch. Die erzeugten Farbkleckse, Punkte, Linien und Flächen erlauben es dem Betrachter den „toolpath“ des Roboters nachzuvollziehen und vermitteln unmittelbar die Bewegung des Roboters.
Zweidimensionale Bewegungen mit dem Pinsel
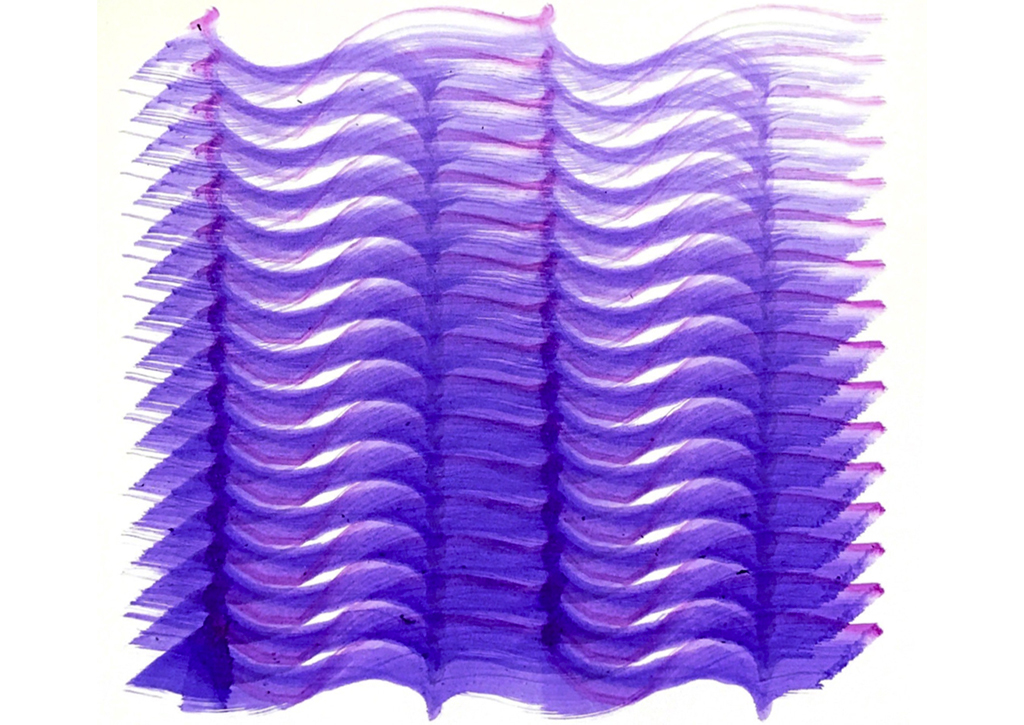
Zweidimensionale Überlagerungen von gleichen Bewegungsabläufen
Zweidimensionale Bewegungen mit breiten Markern
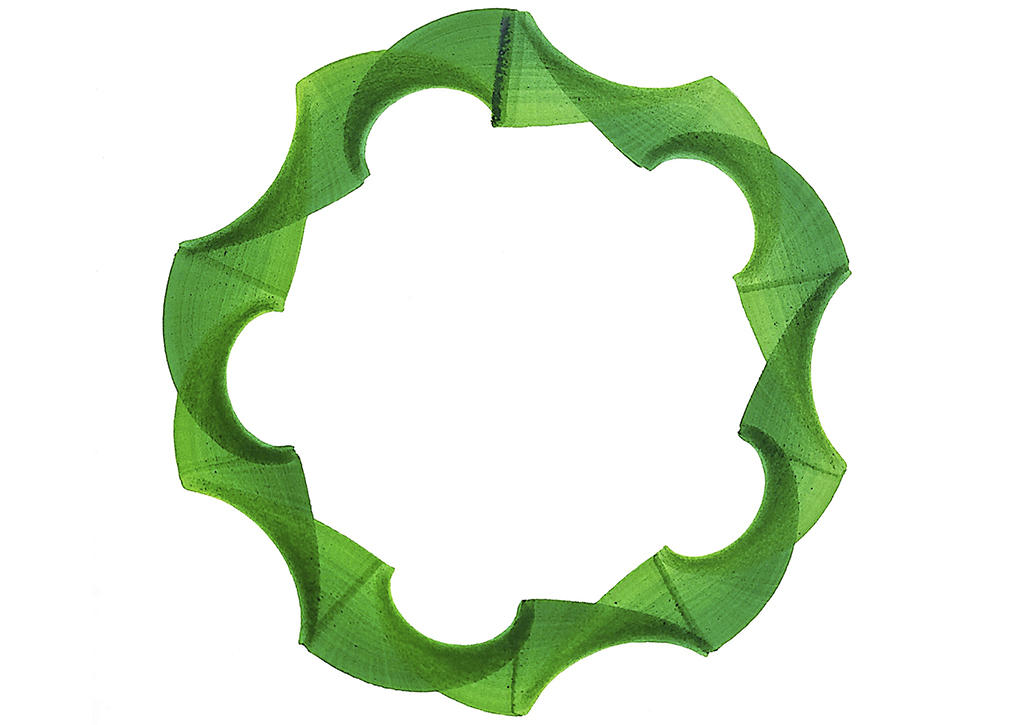
Styropor
Im zweiten Schritt der Erkundungsphase wendeten die Studierenden ihr Wissen über Programmiertechniken und die Steuerung von Robotern an, um experimentelle Ergebnisse mit einem Heißdrahtschneider und Styroporblöcken zu erzielen. Ziel dieser Übung war es, die kreativen Möglichkeiten des Einsatzes eines Roboters zum Schneiden und Formen von Materialien zu erkunden und die Auswirkungen verschiedener Werkzeugwege, Schnittgeschwindigkeiten und Temperaturen zu untersuchen. Die Studierenden experimentierten zunächst mit grundlegenden Schneidetechniken und erkundeten das Potenzial des Heißdrahtwerkzeugs, um eine Vielzahl von geometrischen Formen und Mustern zu erzeugen. Mit zunehmender Sicherheit und Erfahrung begannen sie, die Grenzen des Heißdrahtschneidens zu erweitern und neue Techniken und Werkzeuge zu entwickeln, die digitale Kontrolle mit unvorhersehbaren Elementen kombinierten.
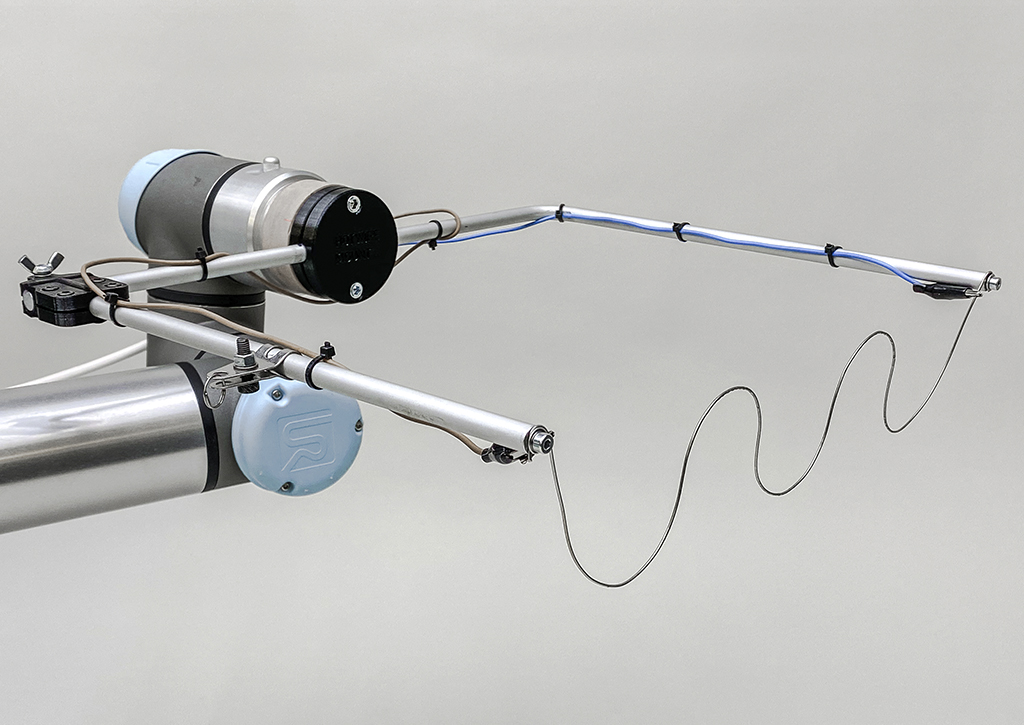
Heißdraht-Endeffektor von Studierenden angepasst
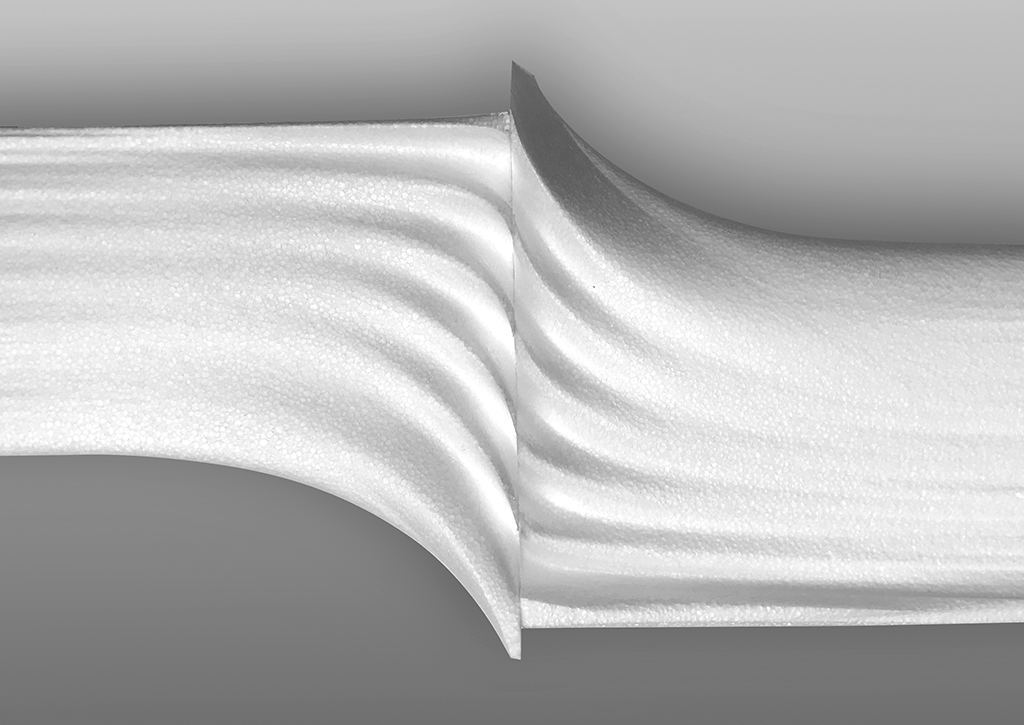
Durch ein Pendel erzeugte Schnitte in Styropor
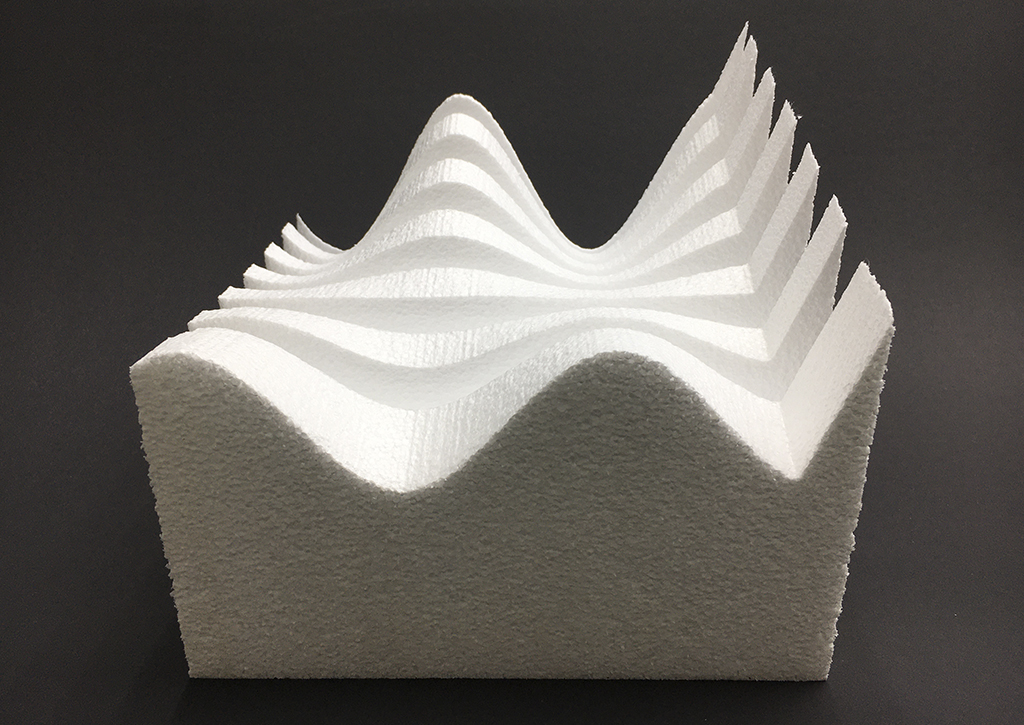
Unterschiedliche Kurvenbewegungen in Styropor
Ton
Die dritte Aufgabe konzentrierte sich darauf, die Studierenden zu befähigen, ihre eigenen Ideen mit Hilfe der Robotik Einrichtung zu entwickeln und umzusetzen. In dieser Phase arbeiteten die Studierenden in Vierergruppen, um ihre eigenen Roboterwerkzeuge und -aufbauten zu entwerfen und zu konstruieren, wobei sie Ton als Hauptmaterial verwendeten.
Eine Gruppe von Studierenden entwickelte ein Roboterwerkzeug zum Aufnehmen und Platzieren von kleinen Tonblöcken. Verbunden wurden diese Blöcke durch Pressen. Mit diesem Werkzeug konnten kleine Tonblöcke positioniert und durch Pressdruck verbunden werden, so dass die Gruppe die natürlichen Eigenschaften des Materials nutzen konnte, um Strukturen zu schaffen, die die ästhetischen Qualitäten des Handwerks mit digitaler Präzision verbinden.
Ein anderes Team konzentrierte sich auf die Entwicklung eines Werkzeugwechslers, der eine Reihe verschiedener Werkzeuge und Spitzen einsetzen kann. Durch wiederholtes Formen von Tonblöcken mit diesen Werkzeugen war die Gruppe in der Lage, eine breite Palette unterschiedlicher Formen zu entwickeln.
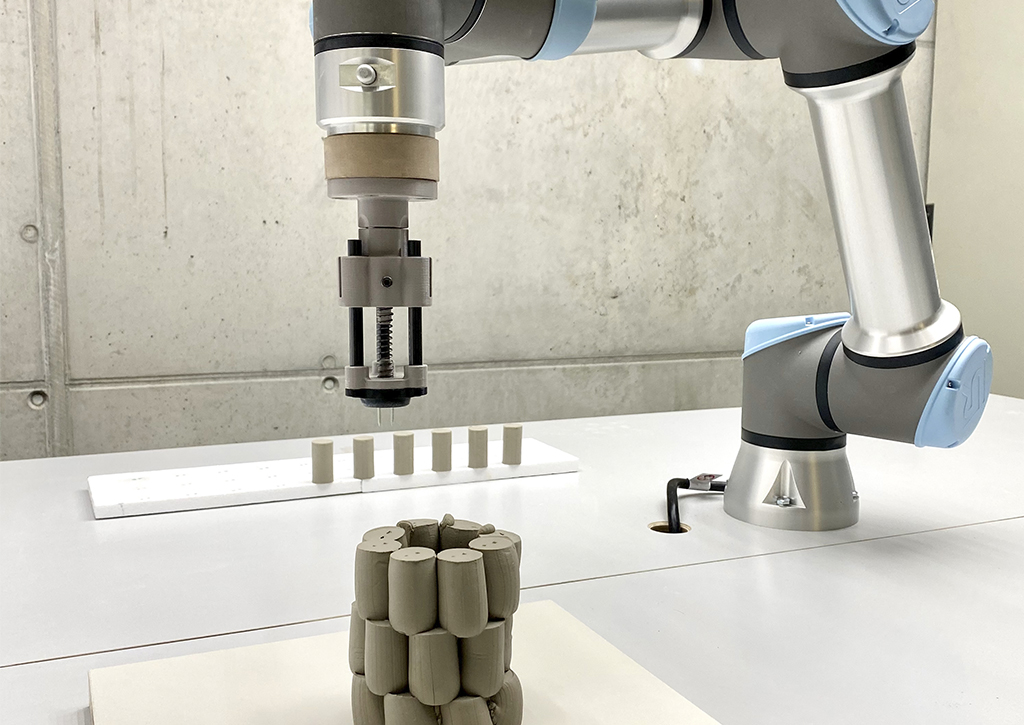
Robotisches Pick-and-place Szenario mit Ton-Zylindern
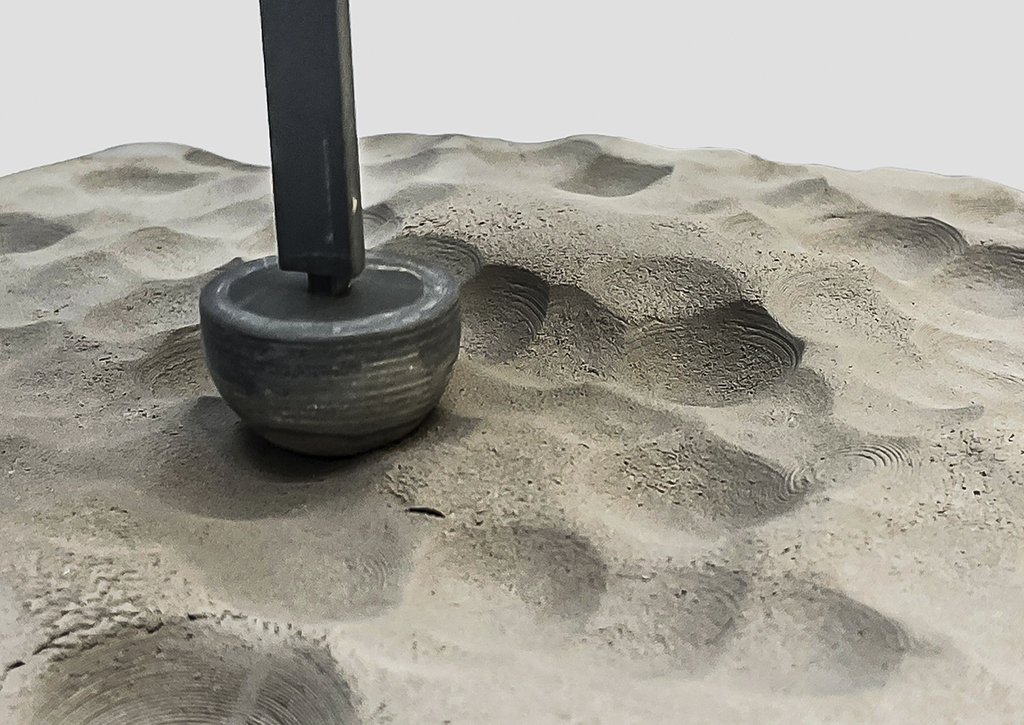
Stempeln mit unterschiedlichen Werkzeugen

Dokumentation des Werkzeugwechslers
Digital Fabricreation
Studierende: Leandra Balliel, Nick Geipel, Marius Greiner, Leopold Max Heimpel, Felix Henßler, Yunhwa Lim, An-Gou Liu, Manuel Löhmann, Ilija Majcen, Minh Phuc Pham, Lotte Schlör, Leon Schoeler
Lehrende: Jörg Hugo, Konrad Jünger, Prof. Nils Krüger, Andrea Rossi
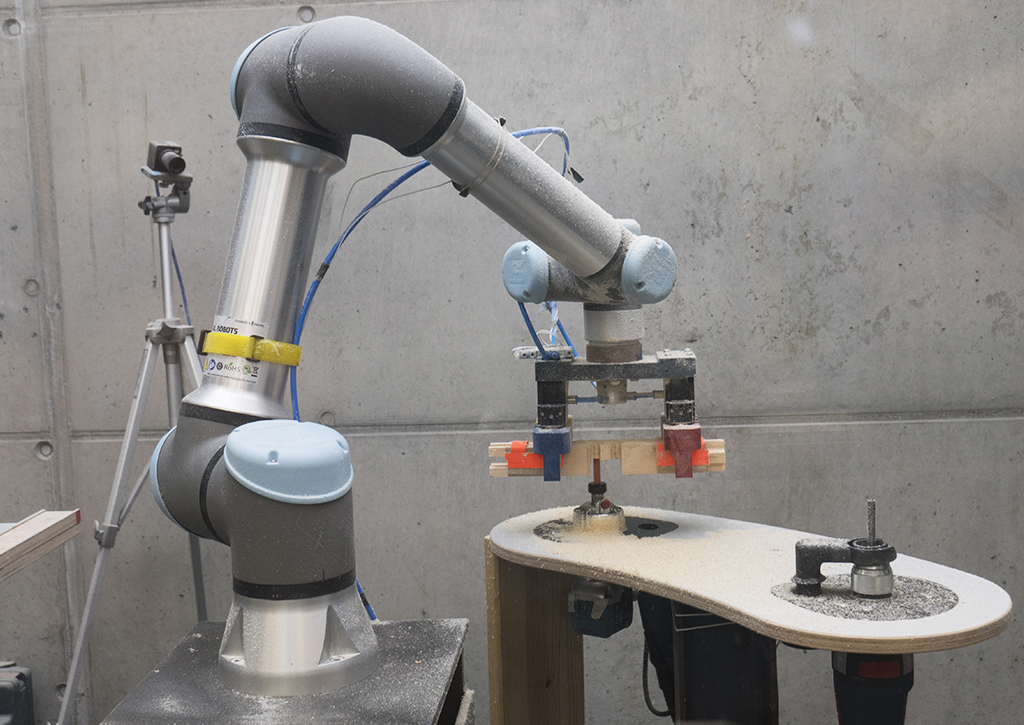
Die Fallstudie „Digital Fabricreation“ (Wintersemester 2021/22, Produktdesign) beschäftigte sich mit der konzeptionellen Verortung und Bewertung digitaler Fertigung im Produktdesign. Um dies exemplarisch an Holzverarbeitungsprozessen zu untersuchen, wurden unterschiedliche Holzbearbeitungsmaschinen, wie Bandschleifer, Oberfräse, Bohrmaschine und robotische Greifer, beschafft und integriert – eine Art Fabrikationslabor eingerichtet.
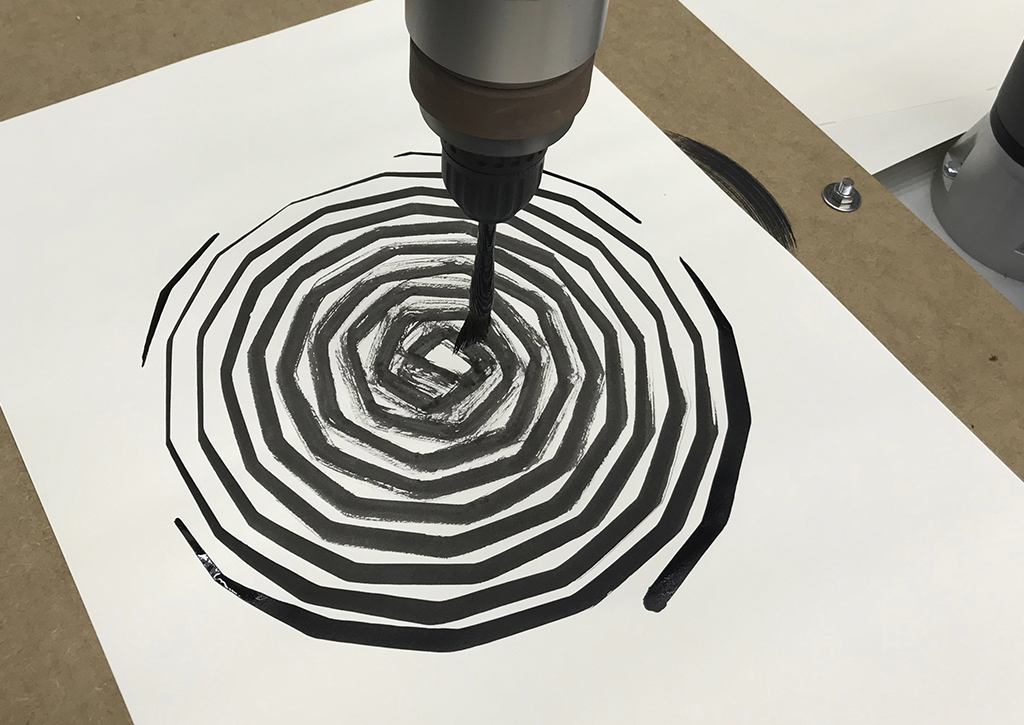
Frässtrukturen
In der ersten Aufgabe näherten sich die Studierenden durch zweidimensionale Fräsübungen der Roboter-Thematik. Die Studierenden untersuchten verschiedene Ansätze zur Implementierung von Helligkeitsgradienten in Form einer Punktverteilung. In der Übung wurden beschichtete MDF-Platten mit den Maßen 20x20cm und ein 3,2mm Bohrer verwendet, um verschiedene Helligkeitsstufen zu erzeugen. Neben der Variation der Bohrungsdichte wurde in der Übung auch die Verwendung unterschiedlicher Werkzeugspitzen untersucht, um verschiedene materialbedingte Effekte zu erzielen. Die Geometrie des Werkzeugs, z. B. ein konischer Fräser oder eine Trennscheibe, konnte verwendet werden, um Löcher oder Linien unterschiedlicher Größe und Länge zu erzeugen. Dadurch konnte eine größere Bandbreite an Helligkeitsstufen erzeugt werden, was zu komplexeren und dynamischeren Mustern führte.
Robotischer Bohr-Endeffektor
Zweidimensionale Fräsübungen in beschichteten Holzplatten
Bohrungen aus verschiedenen Winkeln
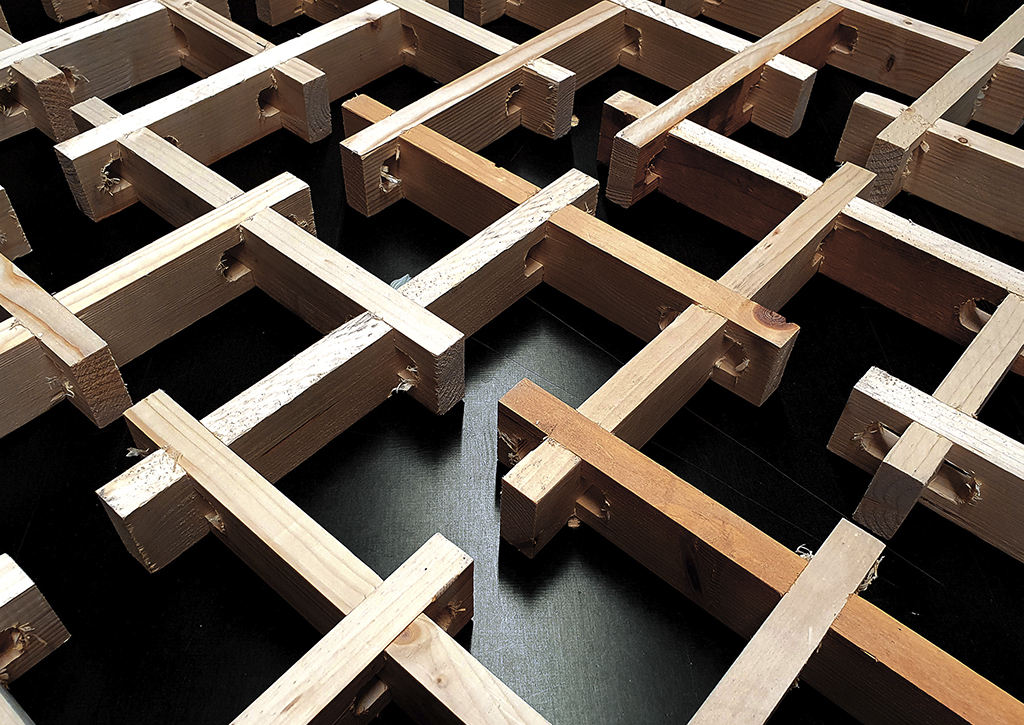
Holzverbindungen
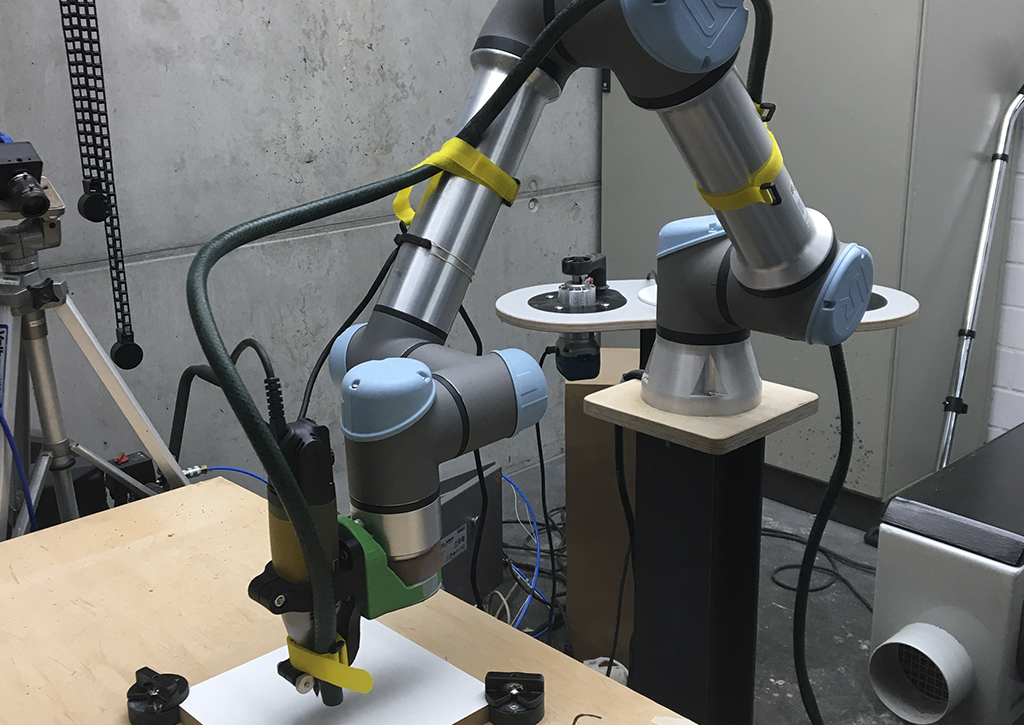
Die zweite Aufgabe konzentrierte sich auf die Anwendung digitaler Fabrikationstechniken mit Hilfe des Roboter-Fertigungslabors. Studierenden sollten mit dem Roboterarm Holzverbindungen entwickeln. Diese Aufgabe verlangte von den Studierenden, mit verschiedenen Verbindungsarten wie Zapfen und Zapfenloch oder Überlappung sowie mit digitalen Konstruktionskonzepten wie modularen Systemen und Aggregationen zu experimentieren. Durch diesen Prozess konnten die Studierenden die Präzision und Wiederholbarkeit des Roboterarms nutzen, um komplexe und präzise Holzverbindungen herzustellen.
Robotisches Setup für gefräste Holzverbindungen mit verschiedenen Werkzeugstationen

Gefräste Verzahnung aus drei Teilen

Zapfenverbindung aus drei Teilen
Generative Designkonzepte
Die dritte und letzte Phase konzentrierte sich auf die Entwicklung von ganzheitlichen Konzepten, die das Potenzial der digitalen Fertigung innerhalb eines industriellen Produktionsmodells erforschten. Aufbauend auf ihren Kenntnissen über Holzverbindungen und digitale Konstruktionstechniken sollten die Studierenden von einzelnen Objekten und Verbindungen sich nun größere Konzepte auf der Grundlage von computergestützten, generativen Designparadigmen erarbeiten.
Eine Gruppe erweiterte ihr Konzept der Aggregationsprozesse, um einen klaren Anwendungsfall zu schaffen und den Benutzern eine feinkörnige Kontrolle über die Positionierung einzelner Elemente im Raum zu geben. Dieser Ansatz ermöglichte die Schaffung komplexer und dynamischer Strukturen, die leicht an spezifische Bedürfnisse und Vorlieben angepasst werden konnten.
Andere Studierende konzentrierten sich auf den Bau großformatiger Modelle, die die unterschiedlichen Eigenschaften ihrer flexiblen Holzverbindungen nutzten. Die so entstandenen Strukturen wiesen spezifische Eigenschaften auf, wie z. B. eine anisotrope Biegefähigkeit, die die Schaffung einzigartiger und dynamischer Formen ermöglichte.
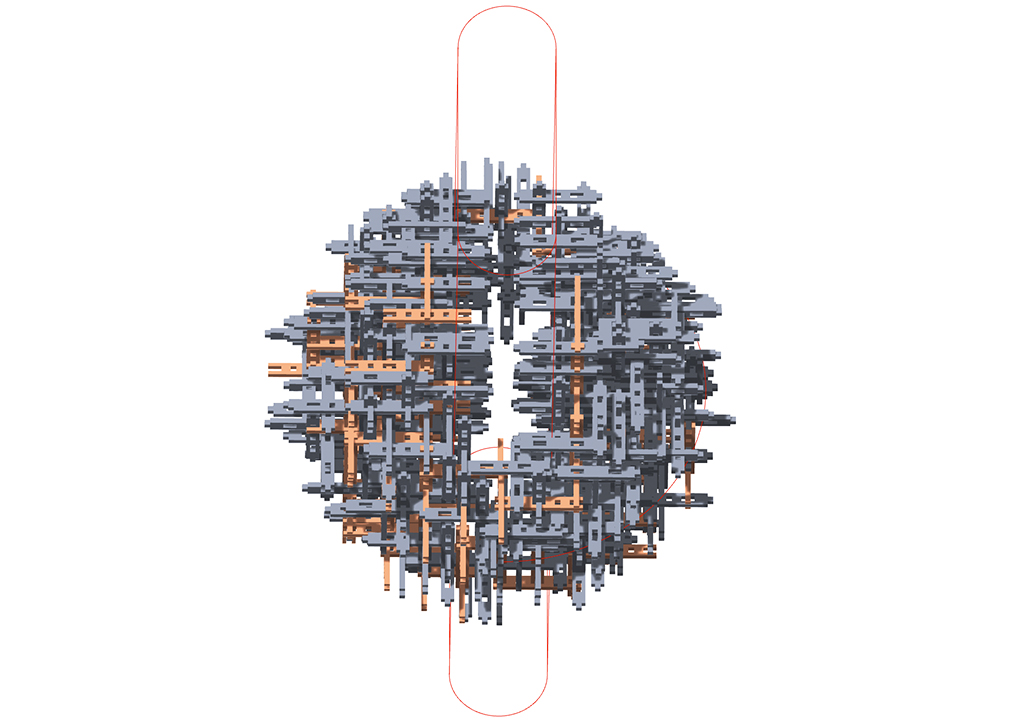
Digitale algorithmische Formenerstellung mit Begrenzungsvolumen
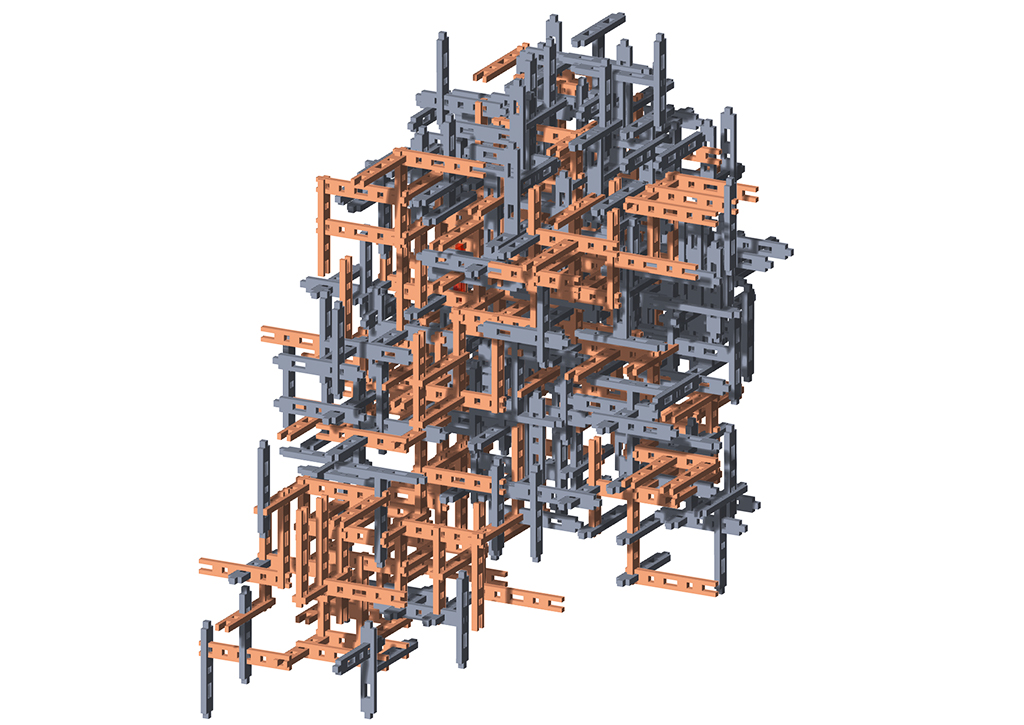
Digitale algorithmische Formenerstellung
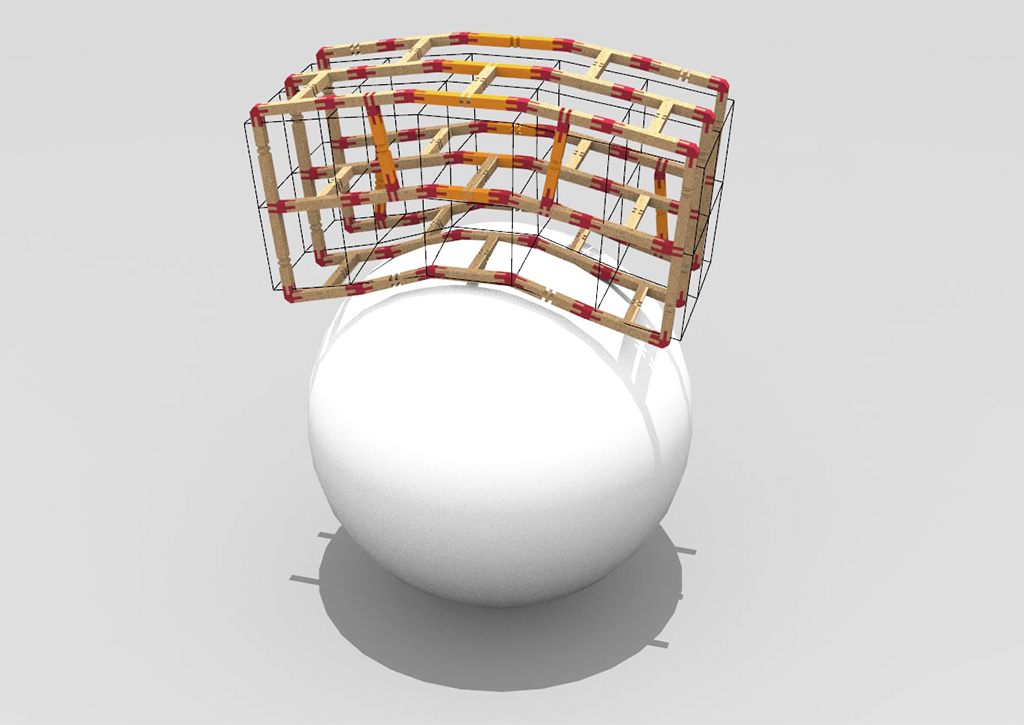
Simulation eines sich an Formen anpassende Holzkonstruktion

Biegefähigkeit einer Holzstruktur
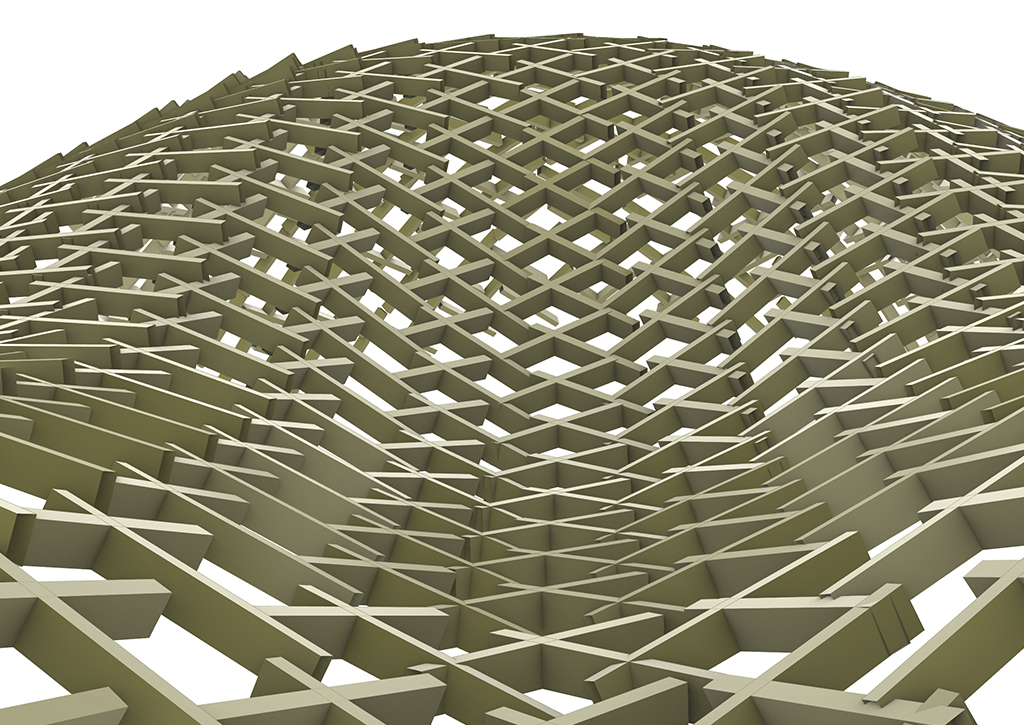
Simulation der Biegefähigkeit